
Hello! I'm Adrit.
I am a Design Engineer working on products that improve peoples' lives. I currently work at Intuitive where we make the DaVinci surgical robot.
Outside of work you can find me working on personal projects, brewing coffee, biking or exploring the world.
SKILLS
-
DESIGN & MANUFACTURING
CAD, CAM (MasterCAM, HSM Works), FEA, Medical Devices, FDA Compliance, Industrial Automation
CNC, Injection Molding, Extrusions, MIM, Stamping, Coatings, Surface Finishes, Surface Treatments
-
ELECTRONICS & SOFTWARE
Microcontrollers, PLCs, Servo Drives, Sensors
Embedded (C, C++), iOS, Web (full stack), SQL, Python, MatLab, Simulink
INTUITIVE SURGICAL
SUNNYVALE, CA. MAR 2016 - PRESENT
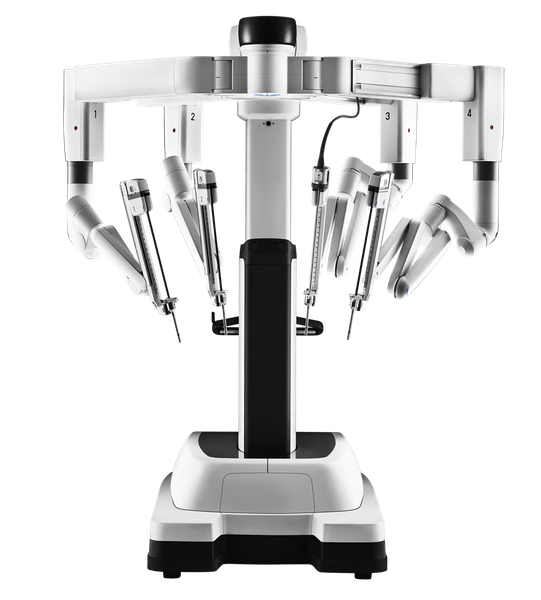
Intuitive makes the DaVinci surgical robot and the surgical instruments that work with the robot. I work on the Advanced Energy Instruments team that designs and develops RF instruments for vessel sealing. Over 1 million surgical procedures are done on DaVinci robots every year. Over 100,000 vessel sealers per year are used for procedures that demand high confidence in hemostasis of critical blood vessels.
DaVinci Xi Surgical Robot, the latest generation for multi-port & multi-quadrant surgery.
PATENTS
- WO2021020683A1 (pending), Systems and method of dithering to maintain grasp force
- US20200360078A1 (pending), Insert guide members for surgical instruments, and related devices, systems and methods
- WO2020231785A1, System and method for controlled grasping and energy delivery
- Several patent applications under review
MANAGING ENGINEER, ADVANCED ENERGY INSTRUMENTS & GENERATOR DESIGN
MAR, 2020
- Cross functional leadership to ensure efficient collaboration between design, manufacturing, controls, clinical, marketing, finance and supplier engineering. Making critical technical and business decisions to ensure product development continues according to timeline and budget. Managing competing opinions and viewpoints in a productive and positive manner.
- Responsible for future product development strategy, including strategic evaluations projects, university collaborations and key technical skill development areas for individual contributors on the team.
- Financial planning & budgeting for active projects.
- Human resource planning and hiring; employee growth, development and compensation.
- Intellectual property: identification and development of key novel ideas that need to be patented. Working with IP lawyers to file patents.
- Continuing individual contributor role for instrument development in a smaller capacity.
SENIOR MECHANICAL ENGINEER, ADVANCED ENERGY INSTRUMENTS DESIGN
AUG, 2018
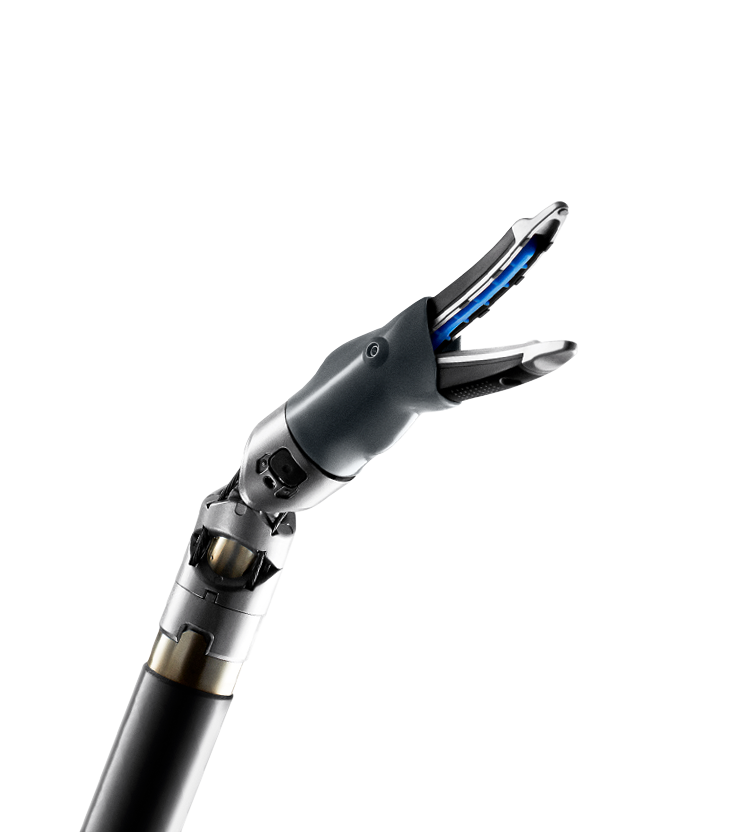
- Intuitive's surgical instruments are driven by servo motors which allow 5 degrees of freedom. Complex mechanisms (gears, cable drives, cams, springs) translate rotary motion from the motors to emulate a human-like wrist while the grips emulate manipulating tissue with the index and thumb fingers. Intuitive motion is achieved by controlling friction, hysteresis, variation and precise, repeatable mechanisms that maintain their characteristics in challenging environments inside the body for long durations. As an instrument design engineer, all those aspects needed to be accounted for, tested and verified for safe and effective use during the development of new instruments that I worked on.
- Co-developed control schemes to aid with static-dynamic friction changes and inertia changes during instrument motion to deliver consistent force regardless of wrist position or velocity of move.
- Developed novel flexible lumen within the instrument wrist to help with path length conservation for wires when instrument wrist is articulated.
- Component design for various processes like overmolding, stamping, MIM, plastic molding and low cost machining to achieve cost targets.
SynchroSeal is the latest vessel sealing instrument developed by my team at Intuitive. This device has novel RF cutting technology that allows simultaneous sealing and cutting, thereby increasing efficiency and allowing for a smaller jaw design. Learn more.
MECHANICAL ENGINEER, ADVANCED ENERGY INSTRUMENTS DESIGN
MAR, 2016
- Supplier Engineering for Endoscopes
- Resolved supplier related issues in manufacturing and part quality
- Performed supplier audit with a lead auditor
- Performed testing and worked with design engineers to change a part's design to help with better production yields
- Manufacturing
- Developed an automated fixture for leak testing the Xi Suction Irrigator Instrument
- Published technical reports for leak testing methodology with experimentally proven data to back theoretical predictions
- Developed and put in production key manufacturing tools for the assembly of the Xi SureForm 60 stapler instrument
- Systems Design (Robot Mechanical Design)
- Developed a creative solution for a joint on DaVinci X that would otherwise have not met clinical preferences fully because of an issue discovered very late in the design cycle
- Debugged encoder linearity issues and came up with design fixes
- Redesigned several parts for better DFM, assembly and reliability
- Conducted V&V testing
Chosen for the Talent Exchange Program - a program in which 5 engineers spend 1 quarter per team in each other's teams. I worked in the following teams:

I worked on key components for the joint and encoder of arm 2 of the DaVinci X robot. The robot was launched in mid 2017.
THERANOS
PALO ALTO, CA. JUL 2011 - FEB 2016
Theranos was a medical device start-up that was designing its own analyzers and provided diagnostic lab services. It used miniaturization of traditional lab analyzers to run a large number of tests on a very small sample of blood. I started with working on the Theranos device, then worked on the design of several consumables used by the device to run assays. I also helped innovate the technology behind a device that can collect blood from a finger stick and store the blood in its containers that then interfaced with the diagnostic device.
PATENTS
- 9877674, granted Jan-18, Systems, devices, and methods for bodily fluid sample collection
- 9810704, granted Nov-17, Systems and methods for multi-analysis
MANAGER, HARDWARE ENGINEERING
JAN, 2015
- Owner of all disposable / consumable design efforts, and automation efforts used to dispense / handle / store and configure the consumables
- Recruiting talent for the hardware engineering teams
- Continued individual contribution to design and development of consumables and automation components
TEAM LEAD, AUTOMATION
JAN, 2014
- Architecting automation lines for high throughput pick and place of consumables used for running diagnostic tests based on near-term growth goals, budgets, timelines and long-term goals while ensuring enough flexibility to allow for changes without significant time or capital reinvestment
Video showing automation at Theranos. I designed all the end-effectors that are on the delta robots in this video
PRODUCT ENGINEER
JUL, 2011
- Device Design
- Part of the original group that designed Minilab Theranos diagnostic device (not 'Edison')
- Responsible for the motion platform, certain fluid handling systems, chassis, cable / connector selections for moving parts and outer enclosure
- Designed and developed several fluid handling systems that handled fluids in the 2-40uL range at sub 5% CV and wrote the firmware and validation programs to test the systems
- Design and tuning of PID controllers for velocity and position control
- Most parts for those systems were CNC machined, sheet metal or metal injection molded. Knowledgeable with materials, coatings, finishes, process constraints and costs for those processes.
- Consumables / Disposables
- Designed several plastic injection-molded disposables to hold reagents and transport fluids
- All designs were made for mass production, bulk fluid dispensing and automation assembly friendly
- Knowledgeable with process limitations, tolerances, materials, finishes, marking, cavitation and molds for injection molding
Video showing the insides of the Minilab. I designed several modules shown in this video.
TESLA
PALO ALTO, CA JUN - SEP, 2010
- Improved the cell simulation model for li-ion cells to better represent their behaviour in extreme temperature and power demand conditions
- Added functionality to the existing battery pack model to allow simulation of li-ion cells with different chemistries in the same pack
REVA ELECTRIC CARS
INDIA FEB - AUG, 2009
- Designed a chassis concept for a 3 wheeled vehicle with a swappable battery pack
- Developed a cost and range optimizing simulation of a battery pack that would change the size and chemistry ratios for electric cars
HONEYWELL
INDIA JUN - AUG, 2008
- Was tasked with developing an algorithm to do weight reduction of parts at the design phase
- Developed an algorithm in Ansys that used parametric modeling with constraints to iterate over multiple possible geometries an pick the option with the lowest weight that met the strength criteria
LUTRON
COOPERSBURG, PA AUG - DEC, 2006
- Designed and manufactured a go-no-go gauge for certain electronic components that were seeing a high failure rate
- Did a stack-up analysis on an assembly with Monte-Carlo analysis to identify parts that needed to be toleranced better / differently
STANFORD
MS MECHANICAL ENGINEERING SEP '09 - JUN '11
- Depth in Mechatronics (ME 218 Series) and Design Methodology (ME 310 Series)
- TA for ME310 - Design Methodology
- TA for Undergrad Dynamics courses
- TA for Digital Photography course
GEORGIA TECH
BS MECHANICAL ENGINEERING AUG '05 - DEC '08
- President's Undergraduate Research Scholarship Awardee
- Won 1st place for senior design project - designing a hybrid Formula SAE race-car
- Research work on Command Shaping and Input Shaping of motion profiles of cranes to minimize payload swing
RC BOAT
MECHATRONICS CLASS PROJECT STANFORD
We built an RC Boat for ME218C - the third class in the mechatronics sequence. The boat's electronics, hardware, hull, powertrain were completely designed and built in 3 weeks. This project incorporated wireless communication using Xbee.
As you can see from the video, we took the competition a little too seriously! Our's is the speedy boat doing the bullying!
BASKETBALL ROBOT
MECHATRONICS CLASS PROJECT STANFORD
For the second Mechantronics class - ME218B - we build an autonomous basketball playing robot. The robot used sensors to detect pulsing IR light and features on the playing surface to navigate around the court. It used a PID-controlled flywheel that changed its speed based on the distance from the hoop to launch the balls. We incorporated a state-machine based control scheme for the robot.
URBAN EV CONCEPT
RESEARCH PROJECT STANFORD
Panasonic, which makes Li-ion batteries, wanted to explore EV concepts for future urban environments. We build a functional prototype of an EV for a single passenger, which folded to reduce its footprint for parking. It also featured a canopy style door that allowed the passenger to enter and exit very easily. We worked under the assumption that autonomous driving would be the norm, so elaborate controls like steering wheels and shift knobs were not part of the car's interior.
SATELLITE IN A CAN - CANSAT
RESEARCH PROJECT GEORGIA TECH
Every year, in the Black Rock Desert in Nevada, college students gather to have their tiny rovers get shot up to 10,000 ft on rockets and dropped. The objective is to make it back to the earth in 1 piece and then navigate to a pre-determined co-ordinate using GPS. The aim of the exercise is to develop very cheap, robust rovers that can be deployed to planets like Mars. Our research group at Georgia Tech took part in this every year. I was part of the team for 2 years and worked on most of the mechanical design, parachute deployment, motors and wheels.



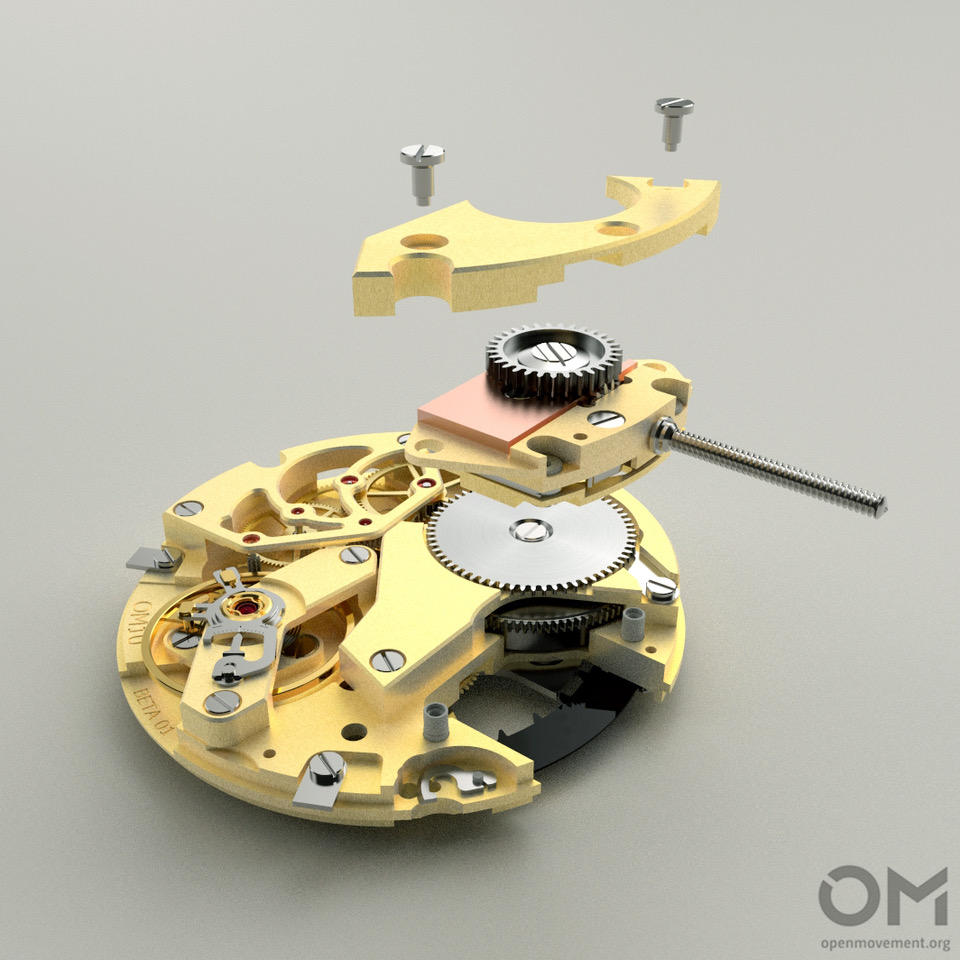
MECHANICAL WATCHES
PERSONAL PROJECT

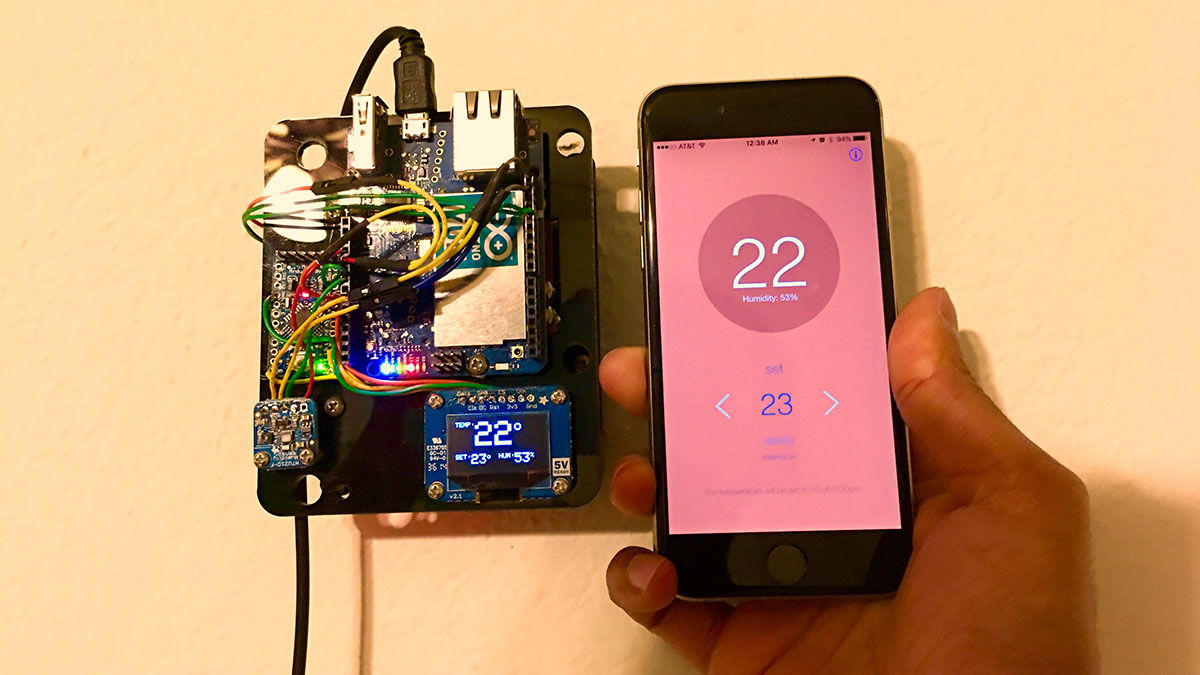
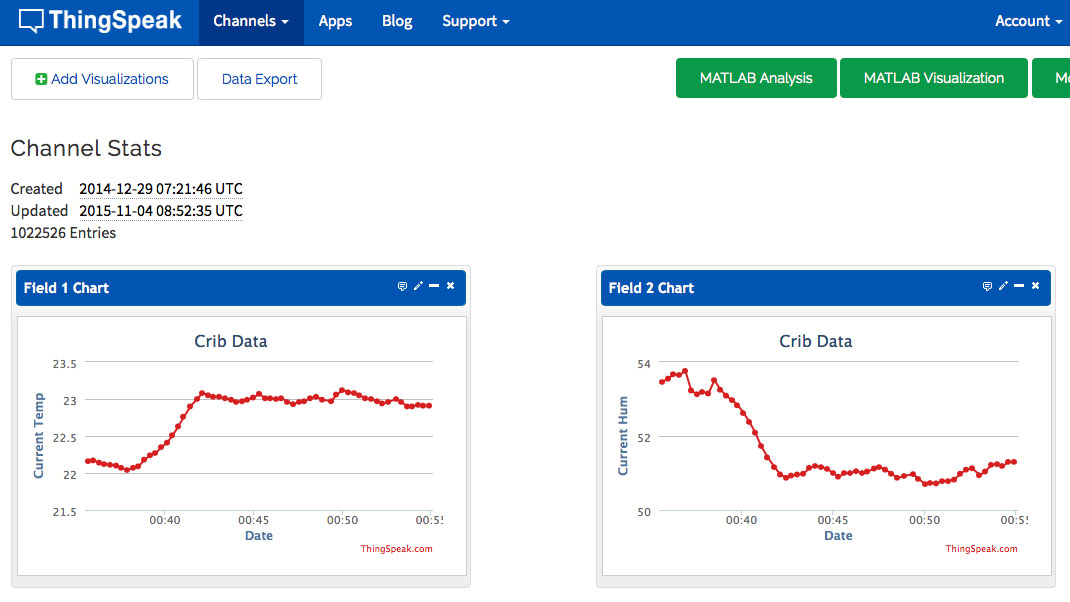
SMART THERMOSTAT
PERSONAL PROJECT
I wanted a Nest in my house, but it turns out the thermostat/heater style is my apartment is so old that the Nest can't be installed with it. It is literally a mechanical thermocouple that connects the lines to turn on the heater! So, I decided to make my own. I used an Arduino Yun (WiFi), a high-load relay, and a temperature sensor for the thermostat. The Arduino pushes & pulls the temperature data to 'ThingSpeak' a web service that has a very simple API to push and pull simple sensor data. The iPhone app also pushes set-point data to the ThingSpeak channel, which is read by the Arduino to turn the heater on/off based on set-point. So, I can control my heater from anywhere!
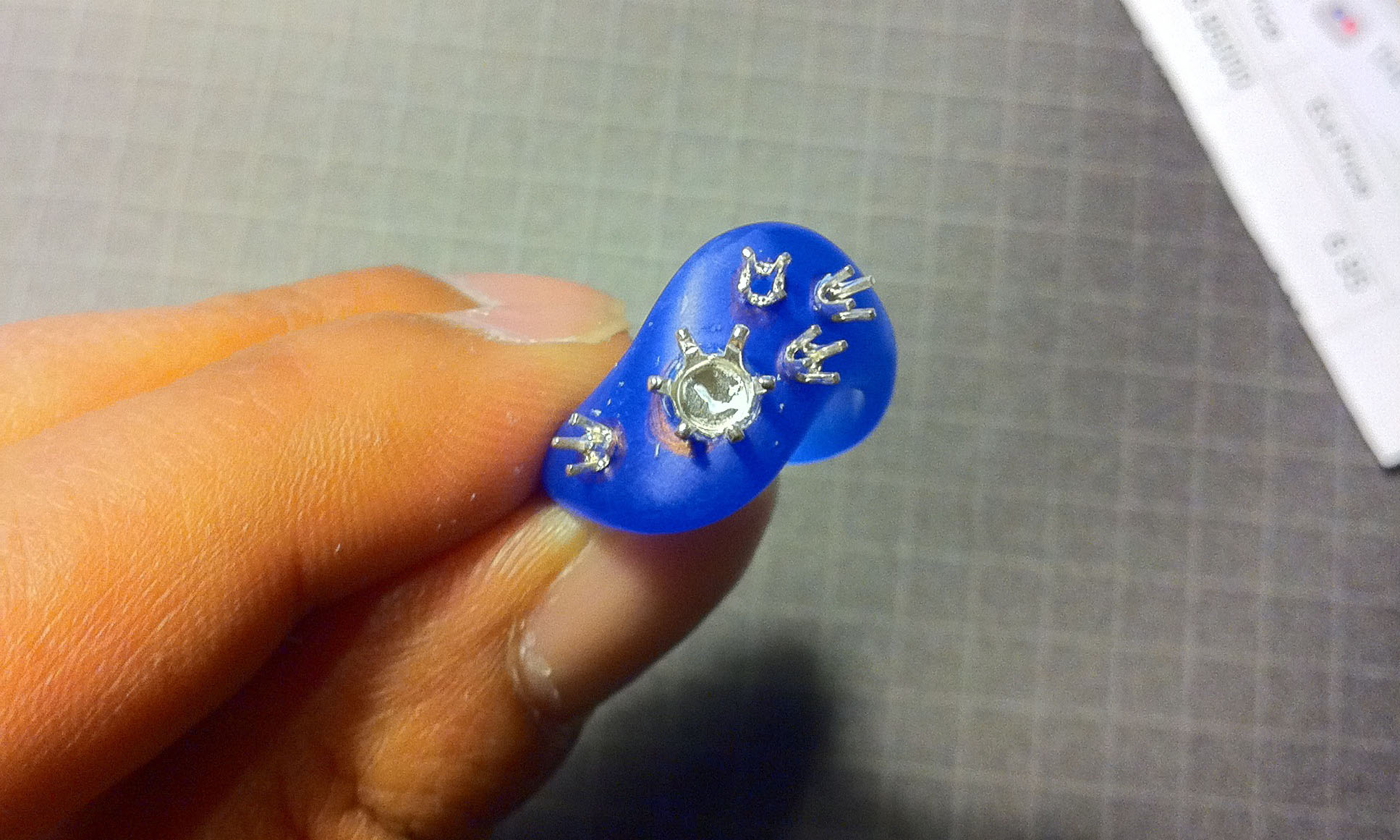
ENGAGEMENT RING
PERSONAL PROJECT
Being a mechanical engineer with a Master's degree, I felt obligated to make my own engagement ring. I sketched out concepts, carved the shape out of wax and had a friend investment cast it. After some sanding, polishing, and installation of a crown that held the diamond, the ring was complete! And, yes, she said yes!


QUADCOPTERS
PERSONAL PROJECT
Quadcoptors or 'Drones' as they are infamously called these days are extremely fun to design, build and fly. A couple of friends and I got pretty into quadcoptors a few years ago. I've designed and built a few frames and quadcoptors. I also have a prototype for a vibration damped gimbal for taking stabilized and motion compensated videos using a GoPro on one of my bigger frames.
-
